




















[1] İkili Telesentrik Optik Sistem
Telesentrik optik sistemli TM-3000 serisi, nesne konumundan bağımsız olarak sabit büyütme sağlayan ve perspektif hatalarını sıfıra indiren çift telesentrik lens yapısına sahiptir. İkili telesentrik lensler, görüntü yakalama için yalnızca hizalanmış ışık kullanılmasını sağlar. Nesne ile lensler arasındaki mesafe değişse bile CMOS’taki görüntü boyutu değişmez. Yüksek hassasiyetli ölçüm yapmak mümkündür.

[2] Nokta Atışı Alt Piksel İşleme
CMOS’ta bulunan siluet üzerinde belirlenen ölçüm alanı içindeki hatta nokta atışı çıkarım ve alt piksel işleme yaparak yüksek hız ve hassasiyet elde edilir.
[3] HUD Ünitesi + Yönlendirici Lens
Yönlendirilmiş ışık, LED ışığın tüm alana eşit şekilde yayılarak pürüzsüz şekilde oluşturulur.
*HUD ünitesi = High Uniform Diffusion unit
[4] Parlak InGaN Yeşil LED
Kullanılan parlak LED üç özelliğe sahiptir:
– Eşit parlaklık dağılımı
– Elektromotor kuvvete dayanıklılık
– Göz koruması

Yeşil LED kullanan optik sistem ve telesentrik lensler hedef üzerine tek tip LED ışık yansıtır.
Bu ışık, görüntüyü 2D CMOS üzerine yansıtır, koyu ve açık alanlar arasındaki sınırlar algılanarak birden fazla noktadan ölçüm yapılabilmesini sağlar. Motorsuz yapısı ve uzun ömürlü ışık kaynağı sayesinde daha dayanıklıdır.

Dış çap ve açılar, nesnenin pozisyonunu değiştirmeye gerek olmaksızın hemen ölçülebilir. Nesne pozisyonu hatırlandığı için doğru ölçüm pozisyon düzeltme ile yapılır. Bir nesnenin yüzeyindeki pürüzlerden kaynaklanan farklı ölçüm sonuçları kenar ortalaması alma özelliği sayesinde ortadan kaldırılarak daha güvenilir ölçüm sağlanır.
Yüksek Hızlı Üretim Desteği

Parlak LED ve çift telesentrik optik sistem ile yüksek hassasiyetli performans
Dış aydınlatmadan etkilenmeyen Thrubeam sayesinde ±0.15 μm tekrarlanabilirlik.
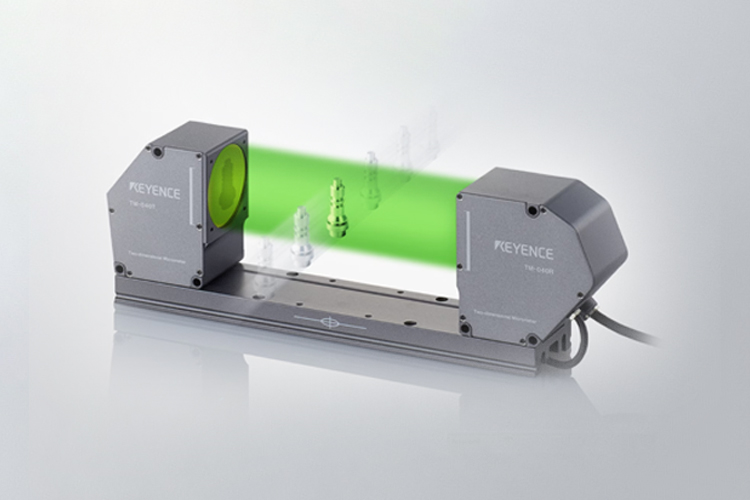
Tam Görüntü Ölçümü

TM-3000 Serisi
2D ölçüm hedefin tamamını tek bir seferde görüntüler. 2D siluete göre yapılan ölçüm CMOS’a yansıtılır. Bu sayede, yalnızca 2D görüntüler kullanılarak yapmanın mümkün olduğu istenen noktalardan ölçüm ya da pozisyon düzelterek ölçüm gibi işlemler yapılabilir.
Geleneksek Lazer Tarama
Lazer taramada ölçüm noktaları yalnızca tek boyutludur. Birden fazla noktayı eş zamanlı olarak ölçmek ya da hedef eğimini düzeltmek mümkün değildir.
Tarayıcı Olmadan Kamera Yöntemi

TM-3000 Serisi
2 boyutlu okuma yöntemi tüm aralığın tek seferde ölçülebilmesini sağlar. Tarayıcı lazer kullanılmadığı için belirli bir nokta tam olarak ölçülebilir.
Geleneksel Lazer Tarama
Lazer tarama yörüngesi, çokgen yansımanın yüzeyine bağlı olarak her örnekte değişiklik gösterir. Laser tarama zaman içinde giderek artan tutarsız motor dönüşlerinden de etkilenir. Parça kullanıldıkça lazer tarama yörüngesindeki tutarsızlık da artar.
Yüksek Dayanıklılık

TM-3000 Serisi
( Motorlu mekanizma yok )
Hareketli parçaları olmayan bir sistem daha yüksek dayanıklılık sunar. Bu da, lazer taramalı mikrometrelerin dezavantajı olan motor dayanıklılığının azalması sorununu ortadan kaldırır.
Ultra Uzun Ömürlü LED;
Işık kaynağı olarak kullanılan GaN (Galyum Nitrat) LED, elektriksel parazitten kaynaklanan ışık kaynağı bozulmasına maruz kalmadan güvenilir ölçüm sağlar.
Geleneksel Lazer Tarama
Çalışan mekanizmanın dayanıklılığı azalır ve bakım gerektirir. Ayrıca lazerde elektriksel parazitten kaynaklanan bozulma olmaktadır.
Geleneksel Lazer Taramanın Prensipleri
Yapı

Ölçüm Prensibi

Ölçüm alanını taramak için, yarı iletken lazer ışını bir motor tarafından döndürülen çokgen aynaya yansıtılır. Lazer ışınının hedefle kesişme süresi ölçülerek hedefin boyutları elde edilir.