






AnasayfaTeknolojilerRobotik ve ElektromekanikRobotlarScara RobotlarDenso 4-Eksen SCARA Robot HM–40 ** / HM-4A**
4-Eksen SCARA Robot HM–40 ** / HM-4A**
HM serisi, 4 eksenli SCARA robotlar arasında en uzun kol mesafesine ve en büyük taşıma gücüne sahiptir. Ürün yelpazesinde ise farklı modeller bulunmaktadır.
- Maks. kol erişimi|600 – 1000mm
- Dikey mesafe (Z)|100 – 150 – 200 – 300 – 400mm
- Maks. yük|10 – 20kg
- Çevrim süresi| 0.29 / 0.31 sn.

Kusursuz yüksek hız performansı
Yüksek güçlü AC servo motoru ve geliştirilmiş kontrol edilebilirliği sayesinde standart çevrim süresi sınıfının en üst seviyesidir.
±0.02 mm’lik minimum pozisyon tekrarlanabilirlik doğruluğu ile bu ürünler hassas çalışma ve hızlı mikro işleme sağlar.
Yüksek hız ve doğru çalışma, üretkenliği önemli ölçüde artırırak muadillerine göre fark yaratır.
Kararlı bir biçimde yüksek hız ve doğru çalışma, üretkenliği önemli ölçüde arttırır.
Özel olarak tasarlanmış Z ekseni sayesinde elde edilen yüksek rijitlik
Dikey eksen için bir kremayer dişli pinyon mekanizması ve yerçekimi dengeli bir hava silindiri benimsenmiştir; bu da ağır yükler taşınırken olağanüstü performans gösterir.
Standart donanım olarak ; 4 adet hava ve 24 damarlı kablo bağlantısı
Maks. Yük taşıma kapasitesi 20 kg
Maksimum taşıma kapasitesi 10 kg veya 20 kg olarak seçilebilir ve ağır yüklerin taşınmasını sağlar.
Opsiyonlar
Ağır kullanım koşullarında kullanılabilen, toz ve buğu geçirmeyen tip; yerden tasarruf sağlayan baş üstü tip; ve ABD’deki UL standartlarını karşılayan konfigürasyon modeli sunulmaktadır.
İşlenen parça, gripper tipine ve çalışma durumuna bağlı olarak parazit algılanmayabilir.
UL listesinde yer alan konfigürasyon modeli yalnızca zemin standındadır.
Seçim Anahtarı
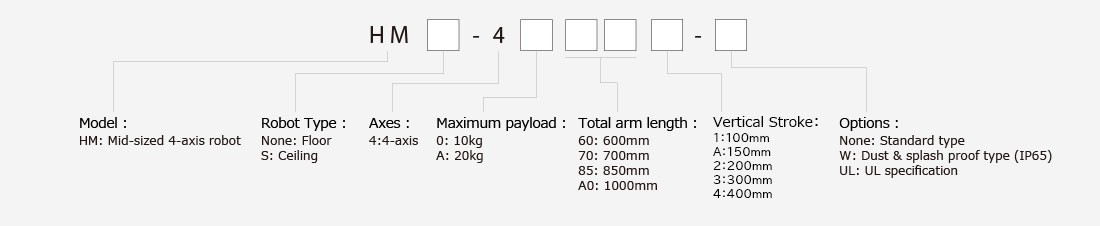
Standart type
| Term | Unit | Specifications | |||||||||||
| Model name of robot unit(*1) | – | HM-4060* | HM-4A60* | HM-4070* | HM-4A70* | HM-4060* | HM-4A60* | HM-4070* | HM-4A70* | ||||
| Axes | – | 4 | |||||||||||
| Position detection | – | Absolute encoder | |||||||||||
| Drive motor and brake | – | AC servomotors for all joints / Air balanced cylinder for Z axis / Brake for Z axis | |||||||||||
| Overall arm length(first arm + second arm) | mm | 600(250+350) | 700(350+350) | 850(350+500) | 1,000(500+500) | ||||||||
| Motion angle and stroke | J1(1st-Axis) | ° | ±165° | ||||||||||
| J2(2nd-Axis) | ±143 | ±147 | |||||||||||
| Z(3rd-Axis) | mm | *=1:100、*=A:150、*=2:200、*=3:300、*=4:400(*4) | |||||||||||
| T(4th-Axis) | ° | ±360 | |||||||||||
| Maximum payload | kg | 10 | 20 | 10 | 20 | 10 | 20 | 10 | 20 | ||||
| Maximum composite speed(at the center of an end-effector mounting face) | At the center of the hand mounting flange | mm/sec | 8,780 | 9,570 | 11,450 | 11,390 | |||||||
| Z | 2,760 | ||||||||||||
| T | °/sec | 2,220 | 1,540 | 2,220 | 1,540 | 2,220 | 1,540 | 2,220 | 1,540 | ||||
| Cycle time(*2) | sec | Approx. 0.2 | Approx. 0.2 | ||||||||||
| Position repeatability(at the center of an end-effector mounting face)(*3) | J1+J2 | mm | ±0.02 | ±0.025 | |||||||||
| Z | ±0.01 | ||||||||||||
| T | ° | ±0.005 | |||||||||||
| Maximum force-fit | N | 98(downward、1second or less) | |||||||||||
| Maximum allowable inertia moment(Inertia) | kgm2 | 0.25 | 0.45 | 0.25 | 0.45 | 0.25 | 0.45 | 0.25 | 0.45 | ||||
| User air piping | – | 4 systems(φ6) | |||||||||||
| User signal line | – | 24(for proximity sensor signals, etc.) | |||||||||||
| Air source | Operating pressure | Mpa | 0.59 | ||||||||||
| Maximum allowable pressure | ±0.01 | ||||||||||||
| Airborne noise (A-weighted equivalent continuous sound pressure level) | dB | 80 or less | |||||||||||
| Weight | kg | Approx. 53 – 56 | |||||||||||
| *1.An asterisk [*] in a model name indicates Z-axis stroke. *2.Time required for a robot to move a 2 kg payload between two points 300 mm apart at a height of 25 mm. *3.Position repeatability is the precision at constant ambient temperature. *4.Z (3rd axis) 100 mm, 150 mm is specially spec. Please contact us for details. |
|||||||||||||
Standart type / UL
| Term | Unit | Specifications | |||||||||||
| Model name of robot unit(*1) | – | HM-4060* -UL |
HM-4A60* -UL |
HM-4070* -UL |
HM-4A70* -UL |
HM-4085* -UL |
HM-4A85* -UL |
HM-40A0* -UL |
HM-4AA0* -UL |
||||
| Axes | – | 4 | |||||||||||
| Position detection | – | Absolute encoder | |||||||||||
| Drive motor and brake | – | AC servomotors for all joints / Air balanced cylinder for Z axis / Brake for Z axis | |||||||||||
| Overall arm length(first arm + second arm) | mm | 600(250+350) | 700(350+350) | 850(350+500) | 1,000(500+500) | ||||||||
| Motion angle and stroke | J1(1st-Axis) | ° | ±165° | ||||||||||
| J2(2nd-Axis) | ±143 | ±147 | |||||||||||
| Z(3rd-Axis) | mm | *=1:100、*=A:150、*=2:200、*=3:300、*=4:400(*4) | |||||||||||
| T(4th-Axis) | ° | ±360 | |||||||||||
| Maximum payload | kg | 10 | 20 | 10 | 20 | 10 | 20 | 10 | 20 | ||||
| Maximum composite speed(at the center of an end-effector mounting face) | At the center of the hand mounting flange | mm/sec | 8,780 | 9,570 | 11,450 | 11,390 | |||||||
| Z | 2,760 | ||||||||||||
| T | °/sec | 2,220 | 1,540 | 2,220 | 1,540 | 2,220 | 1,540 | 2,220 | 1,540 | ||||
| Cycle time(*2) | sec | Approx. 0.2 | Approx. 0.2 | ||||||||||
| Position repeatability(at the center of an end-effector mounting face)(*3) | J1+J2 | mm | ±0.02 | ±0.025 | |||||||||
| Z | ±0.01 | ||||||||||||
| T | ° | ±0.005 | |||||||||||
| Maximum force-fit | N | 98(downward、1second or less) | |||||||||||
| Maximum allowable inertia moment(Inertia) | kgm2 | 0.25 | 0.45 | 0.25 | 0.45 | 0.25 | 0.45 | 0.25 | 0.45 | ||||
| User air piping | – | 4 systems(φ6) | |||||||||||
| User signal line | – | 24(for proximity sensor signals, etc.) | |||||||||||
| Air source | Operating pressure | Mpa | 0.05 – 0.35 | ||||||||||
| Maximum allowable pressure | 0.59 | ||||||||||||
| Airborne noise (A-weighted equivalent continuous sound pressure level) | dB | 80 or less | |||||||||||
| Weight | kg | Approx. 53 – 56 | |||||||||||
| *1.An asterisk [*] in a model name indicates Z-axis stroke. *2.Time required for a robot to move a 2 kg payload between two points 300 mm apart at a height of 25 mm. *3.Position repeatability is the precision at constant ambient temperature. *4.Z (3rd axis) 100 mm, 150 mm is specially spec. Please contact us for details.. |
|||||||||||||
Standart type / Overhead-mount
| Item | Unit | Standard type / Overhead-mount | |||||||||||||||
| Model name of robot unit(*1) | – | HMS-4070* | HMS-4A70* | HMS-4085* | HMS-4A85* | ||||||||||||
| Axes | – | 4 | |||||||||||||||
| Position detection | – | Absolute encoder | |||||||||||||||
| Drive motor and brake | – | AC servomotors for all joints / Air balanced cylinder for Z axis / Brake for Z axis | |||||||||||||||
| Overall arm length(first arm + second arm) | mm | 700(350+350) | 850(350+500) | ||||||||||||||
| Motion angle and stroke | J1(1st-Axis) | ° | ±165° | ||||||||||||||
| J2(2nd-Axis) | ±143 | ±147 | |||||||||||||||
| Z(3rd-Axis) | mm | *=1:100、*=A:150、*=2:200、*=3:300、*=4:400(*4) | |||||||||||||||
| Maximum payload | kg | 10 | 20 | 10 | 20 | ||||||||||||
| Motion angle and stroke | J1(1st-Axis) | ° | ±165° | ||||||||||||||
| J2(2nd-Axis) | ±143 | ±147 | |||||||||||||||
| Z(3rd-Axis) | mm | *=1:100、*=A:150、*=2:200、*=3:300、*=4:400(*4) | |||||||||||||||