Daha hızlı
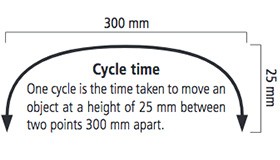
HS-A1 Serisi robotlar, en yeni RC8A kontrolör ile motor performansını en üst düzeye çıkararak, standart çevrim süresini 0,29 saniyeye çıkarır.
Yüksek Hassasiyet
Kolların durumu dinamik olarak robot kontrolüne yansıtılarak robotun titreşimi kısa sürede sönümlenebilmektedir. Yüksek hızlı taşıma ve artık titreşim sırasında titreşimi bastırmak doğruluğu artırır.
Opsiyonlar
Toz ve buğu geçirmez tip; temiz tip; baş üstü tip; UL listesinde yer alan konfigürasyon modeli(1) sunulmaktadır. Çeşitli kurulum ortamlarında otomasyonun sağlanmasına yardımcı olur.