Denso VS-6556/6577 5-6 Eksen Robotlar
Kompakt ve ince gövdesi ile mükemmel yüksek güç ve hıza sahiptir.
- Maks. kol erişimi|653 – 854mm
- Maks. yük|7kg
- Çevrim süresi|0.49 – 0.59 sn

Maksimum 7 kg taşıma kapasitesi (bilek yönü: aşağı doğru dikey yöne göre maks. ±45 derece)
Maksimum 7 kg yük taşıma kapasitesiyle (bilek yönü: aşağı doğru dikey yöne göre maks. ±45 derece)*1, VS-6556 ve VP-6577, küçük boyutları için çok güçlüdür ve el tasarımında daha fazla esneklik sağlar .
İnce gövde yapısı
110 mm’lik küçük kol genişliği ile VS-6556 ve VP-6577, diğer tesislerle etkileşimi azaltabilir.
Taban alanı sadece 200 mm x 200 mm’dir. Tüm gövde, iki standart kartpostaldan oluşan bir alana sığarak tesislerin boyutlarının küçültülmesine yardımcı olur.
Standart donanım olarak; 7 adet hava, 10 damarlı kablo bağlantısı ve bir selenoid valf
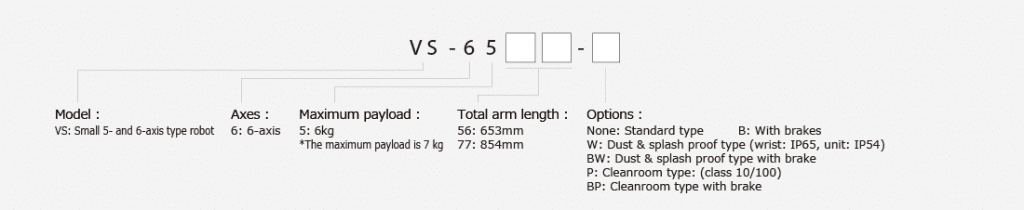
Opsiyonlar
Ağır kullanım koşullarında kullanılabilen toz geçirmez, buğu geçirmez tip ve temiz odaların otomasyonu için mükemmel olan temiz tip.
| Maks. kol erişimi | Brake | Standart tip | Toza ve sıçramaya dayanıklı tip [Bilek:IP65、 Robot Ünitesi:IP54’e eşdeğer] |
Temiz oda tipi(*2)[Temizlik seviyesi: class10(0.1μm class100(0.3μm)] |
||||||
| 650mm | Standard type:2・3・4-axis With Brakes |
VS-6556 | VS-6556-W | VS-6556-P | ||||||
| 850mm | VS-6577 | VS-6577-W | VS-6577-P | |||||||
| 650mm | Expansion: Brakes for all joints (not contained in 1-axis) |
VS-6556-B | VS-6556-BW | VS-6556-BP | ||||||
| 850mm | VS-6577-B | VS-6577-BW | VS-6577-BP | |||||||
| 1. ±45° üzerinde maksimum 6kg taşıma kapasitesi. 2. Zemine ya da tavana monte edilebilir (Temiz oda modeli yalnızca zemine monte edilir). |
||||||||||
Seçim Anahtarı
| Item | Standard type | Standard type / With brakes | ||||||||
| Model name of robot unit | VS-6556 | VS-6577 | VS-6556-B | VS-6577-B | ||||||
| Axes | 6 | |||||||||
| Overall arm length | 270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
270(first arm)+ 295(second arm)=565mm |
365(first arm)+ 405(second arm)=770mm |
||||||
| Arm offset | J1(swing):75mm J3(front arm):90mm | |||||||||
| Maximum motion area | R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
R=733mm(end-effector mounting face) R=653mm (Point P: J4, J5, J6 center) |
R=934mm(end-effector mounting face) R=854mm (Point P: J4, J5, J6 center) |
||||||
| Motion range | J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+166°, -119°, J4:±190°, J5:±120°, J6:±360° |
J1:±170°, J2:+135°, -100°, J3:+169°, -119°, J4:±190°, J5:±120°, J6:±360° |
||||||
| Maximum payload | 7kg(Within a downward wrist angle of movement of ±45°) (※4) | |||||||||
| Maximum composite speed | 8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
8200mm/s (at the center of an end-effector mounting face) |
7600mm/s (at the center of an end-effector mounting face) |
||||||
| Cycle time(※1) | Approx. 0.4(sec) | Approx. 0.5(sec) | Approx. 0.4(sec) | Approx. 0.5(sec) | ||||||
| Position repeatability(※2) | In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.02mm (at the center of an end-effector mounting face) |
In each of X, Y and Z directions:±0.03mm (at the center of an end-effector mounting face) |
||||||
| Maximum allowable inertia moment | Around J4 and J5:0.41kgm2 Around J6:0.063kgm2 (7kg payload) | |||||||||
| Position detection | Absolute encoder | |||||||||
| Drive motor and brake | AC servomotors for all joints, Brakes for joints J2 to J4 | AC servomotors for all joints, Brakes for joints J2 to J6 | ||||||||
| Brake releasing | Enter a brake release command with the teach pendant or mini-pendant. | |||||||||
| User air piping(※3) | 7 systems(φ4×6、φ6×1) 3 solenoid valves (2-position, double solenoid) contained. |
|||||||||
| User signal line | 10(for proximity sensor signals, etc.) | |||||||||
| Air source | Operating pressure | 1.0×105Pa – 3.9×105Pa | ||||||||
| Maximum allowable pressure | 4.9×105Pa | |||||||||
| Degree of protection | IP40 | |||||||||
| Weight | Approx. 35kg (77lb) | Approx. 36kg (80lb) | Approx. 35kg (77lb) | Approx. 36kg (80lb) | ||||||
| 1.Time required for a robot to move a 1 kg payload between two points 300 mm apart at a height of 25 mm. 2.Position repeatability is the precision at constant ambient temperature. 3.Controllable by use of the embedded solenoid valve only for φ4×6. 4.If wrist downward movement exceeds ±45°, the maximum payload is 6 kg. |
||||||||||